
阀门电动装置蜗轮蜗杆精确建模研究
摘要:蜗轮蜗杆是阀门电动装置的关键传动部件,进行精确的实体建模是进行有限元接触分析的前提,而蜗轮的齿面是复杂的空间曲面,是建模的难点。通过蜗轮蜗杆的啮合关系得出蜗轮齿面啮合方程,运用 Matlab 编程求解蜗轮齿面方程得到齿面上的离散点,再通过 Pro/E 逆向反求得到蜗轮齿面,最终实现蜗轮的精确建模。另外通过 Pro/E 建立蜗杆模型并对蜗轮蜗杆进行装配,经检验装配后无干涉存在,结果表明该方法能够准确地建立蜗轮蜗杆实体模型。
在煤矿安全生产过程中,瓦斯抽放是必不可少的安全措施。目前抽放的高浓度瓦斯可直接进行利用,而占抽放瓦斯大部分的低浓度瓦斯(浓度 30%以下)无法直接利用,随着煤层气利用技术的发展,低浓度瓦斯可以进行发电、乏风氧化利用等。在瓦斯抽放过程中,阀门的应用日益广泛,阀门电动装置是通过电动方式控制管道阀门的启闭与调节的设备。本文中的阀门电动装置符合煤矿相关安全标准,具有本质安全兼隔爆的防爆形式。
在阀门电动装置中,蜗轮蜗杆传动是关键部件,其三维模型可用于有限元分析、运动仿真与结构分析等,而蜗轮的齿面是一种复杂的空间曲面,所以在采用有限元方法对啮合过程中的接触应力分布进行分析时,建立准确的蜗轮模型是获得正确结果的前题。文献[1-3]介绍在三维 CAD 设计软件 SolidWorks、Pro/E 中建立蜗轮实体模型的方法,SolidWorks 自身也提供建立蜗轮实体模型的插件 GearTrax,这些方法都是由中间平面的渐开线绕一扫描线扫描形成的蜗轮齿形形成的齿形不够准确,与蜗杆进行装配后会有干涉存在。本文通过 Matlab 进行编程对蜗轮蜗杆啮合面方程进行求解,再运用 Pro/E 进行逆向反求得到精确的蜗轮模型,蜗轮与蜗杆装配后没有干涉,实现了蜗轮蜗杆精确实体模型建立。
1 蜗杆模型建立
采用阿基米德型(ZA)蜗杆,具体参数为:模数 m=3.15,头数 z1=2,直径系数 q=10,压力角 alpha=20°。
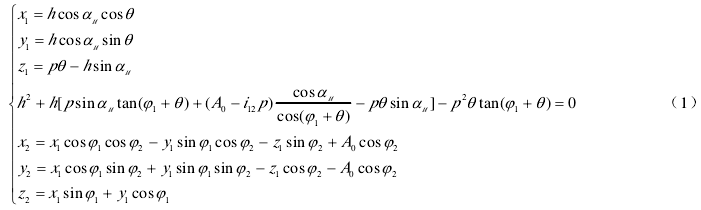
首先创建蜗杆轴,在 Pro/E 中用旋转命令创建蜗杆轴,如图 1 所示。蜗杆螺旋面的形成与螺纹相似,是由一个梯形齿形绕螺旋线扫描而成。用[螺旋扫描]-[切口]命令进行蜗杆齿槽的绘制,切口的齿形为梯形,具体尺寸由蜗 杆式中:h 为啮合点 K 沿齿形角方向到蜗杆轴线的距离;p 为螺旋参数,大小等于蜗杆导程除以 2π;αu为压力角、蜗杆齿形角;θ 为啮合点K 相对蜗杆的转角;φ1为蜗杆在 o[x,y,z]中的转角φ2为蜗轮在 op[xp,yp,zp]中的转角;A0为中参数决定,螺旋线的轴向导程为 P=z1mπ,最终的蜗杆三维模型如图 2 所示。
2 蜗轮模型建立
首先建立蜗轮齿面方程,通过数值计算方法求解,得到一系列坐标,通过 Pro/E 里的逆向工程方法得到蜗轮齿面,然后进行布尔运算得到一个蜗轮的齿槽,最后进行环形阵列得到蜗轮的模型。
蜗轮参数为:模数 m=3.15 mm,齿数 z2=60,宽度 B=24.5 mm,变位系数 x2=-0.7143。
2.1 求解蜗轮蜗杆啮合方程
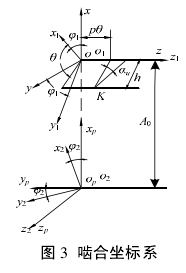
研究蜗轮与蜗杆啮合关系时,通常建立四个坐标系 o[x,y,z]、op[xp,yp,zp]、o1[x1,y1,z1]与 o2[x2, y2,z2],前两个为固定坐标系,后两个是运动坐标系、分别与蜗杆和蜗轮固结。各坐标系的相对关系如图 3 所示。 根据 ZA 蜗轮蜗杆的啮合原理,可得到蜗轮蜗杆啮合方程如下:
心距;i12为传动比;x1、y1、z1为啮合点 K 在o1[x1,y1,z1]中的坐标;x2、y2、z2为啮合点 K 在o2[x2,y2,z2]中的坐标。
该啮合方程为非线性超越方程,有 h、φ1和 θ 三个变量。求解方程时,通过设置 h 和 φ1的范围,通过两层循环,可解出每一个对应 h和 φ1下的 θ 值,从而得到齿面上离散的坐标点,这个过程是通过 Matlab 编程实现。
2.2 建立蜗轮模型
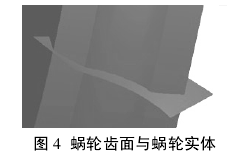
解方程得到的*.txt 文件通过 Imageware 12转换为*.igs 格式文件,导入 Pro/E 进行求,通过插入[独立几何]命令把数据点扫描成曲线,再根据扫描的曲线通过[创建曲面]命令拟合成曲面,接着根据齿顶圆大小创建蜗轮实体,蜗轮实体与形成的蜗轮齿面如图 4 所示。
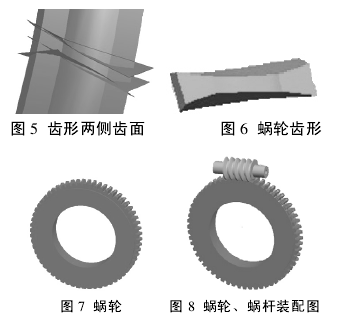
对蜗轮实体进行切除,剩下齿根圆到齿顶圆部分。镜像生成另一侧齿面,之后还需要进行旋转一个角度。蜗轮分度圆齿厚为 S=(π/2+2xtanx)m=3.3101 mm,在分度圆上齿廓两侧的镜像角为 Φ=(π+4 xtanα)/2z=1.0035°。对另一侧齿面绕蜗轮轴线进行旋转,旋转角度为 2Φ。如此便生成蜗轮齿形两侧的齿面,如图 5 所示。
对创建的蜗轮齿面与蜗轮实体进行布尔运算,得到蜗轮的齿形,如图 6 所示。环形阵列,创建蜗轮齿根圆实体,绘制中心孔,与齿形进行布尔运算,得到完整的蜗轮,图 7 所示。
为了检验蜗轮蜗杆的设计与三维模型的正确与否,应将蜗轮蜗杆进行装配(图 8),对其进行干涉检验,并为进一步的机械运动性能和结构强度的分析仿真作铺垫,通过验证装配后无干涉存在,实现了蜗轮蜗杆的精确建模。
3 结论
本文所述方法,是基于蜗轮蜗杆传动的啮合方程,用曲面逆向反求生成蜗轮齿面,准确可靠,能够真实反映蜗轮齿面的特征和正确形状,实现蜗轮和蜗杆精确模型建立,是后续对蜗轮蜗杆装配体进行有限元接触分析及机构运动仿真的基础。此外,本文结果对其他类型的普通圆柱蜗杆机构模型建立具有参考意义,可采用相似方法生成相应蜗轮齿面的正确模型,只需将式(1)改成相应的齿面方程即可。








